

Balancing One-Wheeled Scooter
“It’s very similar to a snowboard to ride, requiring no user input other than the movement of your body mass. Leaning forwards and backwards controls the velocity and moving your weight from heal to toe controls the turn radius. It’s easy and very intuitive to ride.
The main controller is a PIC16F876A running at 20mHz. Pitch angle feedback is provided by an ADXRS300 Rate Gyro and a ADXL202 dual axis accelerometer from Analog Devices. The gyro signal is integrated and mixed with 0.5% of the gravity signal from the accelerometers (this corrects for drift). There’s a better way to do this – it’s called a Kalman Filter and is one of the next improvements I’ll make to the control.”
Via: Make
|
|

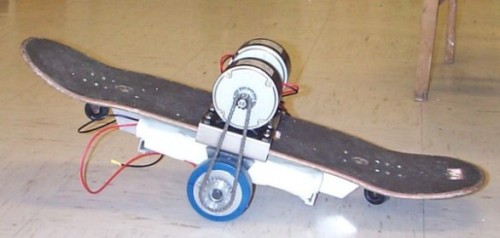
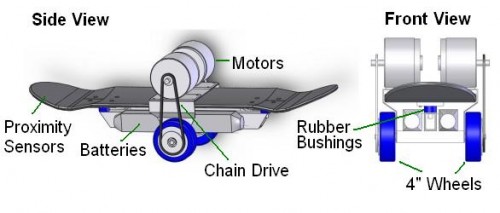
Skatanova, a Self-Balancing Skateboard

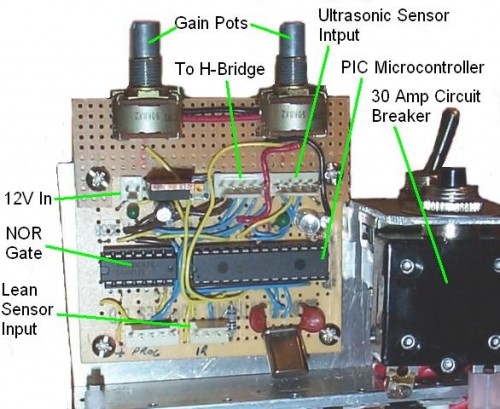
“The control electronics are fairly simple, just a couple of regulators to step the 28.8 volts from the drill batteries to 12V, then to 5V for the controller logic. A PIC digitizes the analog inputs from the gyro and accelerometers and outputs a PWM signal for each motor. The signals go from the PIC to the SN754410 relay driver, which drives the reversing relays and the motor MOSFETs.
To control the deck, one foot applies power and the other steering. Basically these are foot switches which use cutouts on the deck as a sort of springy lever. When the lever is depressed by the rider’s foot, the edge of the plywood moves down and actuates a microswitch bolted to the skid plate on the bottom of the board. The screws and washers limit the travel of the lever so the user doesn’t crush the switch. No doubt something more exotic (and reliable) could be engineered, but this serves well enough for now.”
Via: Hackaday
Self Balancing Skateboard
|
|
“Developed in the Spring quarter of 2005 by 4 Engineers at Stanford University (for a feedback controls class project), this self balancing skateboard is battery powered and has an analog controller. Like a Segway user shifts weight in the direction he/she wants to move.”
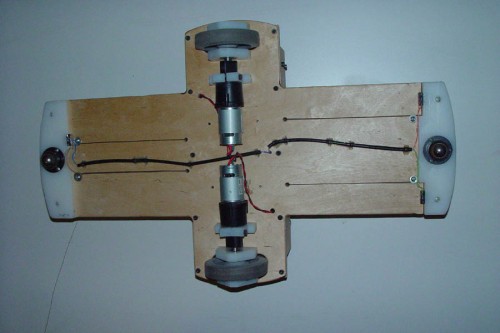
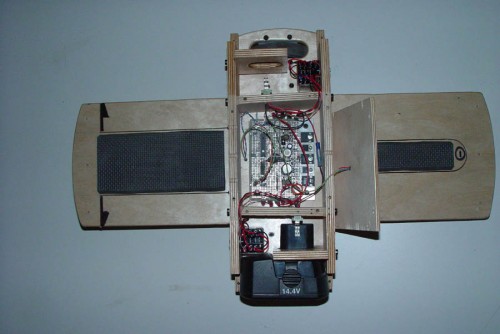
Emanual Version 2
“Something quite remarkable happened from when the original emanual got upgraded to a hub motor version with a real rate gyro, it became rideable! Once the gain feedback was properly adjusted, anyone could stand on this platform and be stable, no learning curve at all. I didn’t have time to do a proper lean actuated steering like the first emanual, so there is a small potentiometer on the end of the handle that the rider uses to steer. Anyways this worked quite well as a means to get around Black Rock City, and the most remarkable part of all was how little energy it used. With a DrainBrain fitted on board my average current draw at jogging speeds was about 2.5 amps, meaning I could expect 3 hours of use off the single 36V 8Ah battery pack.”
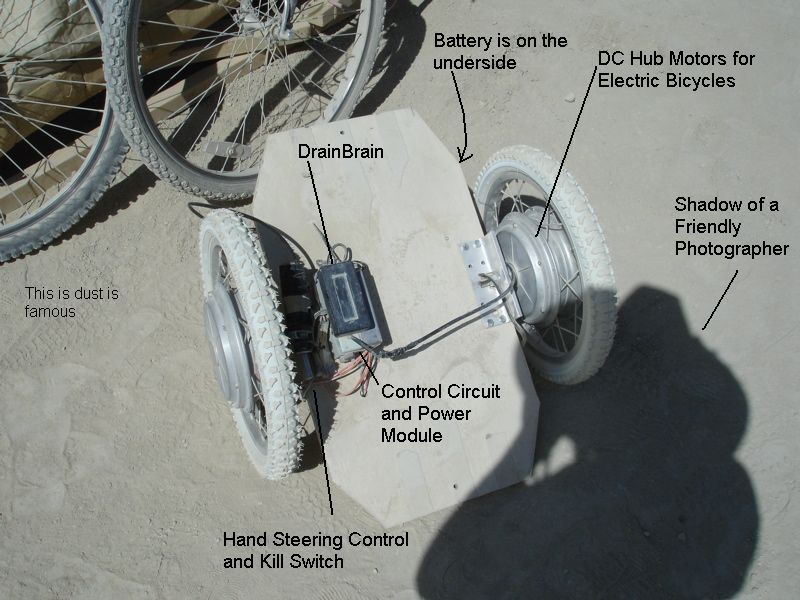
Emanual
“The inspiration for this project naturally came from Dean Kamen’s Segway. Dean had the farsighted vision of small lightweight Personal Electric Vehicles (PEV’s) redefining urban transportation. Unfortunately, he tried to plan out and orchestrate such a revolution top down with a novel self-balancing scooter. Early media speculation and tight-lipped secrecy made for a ridiculously over-hyped situation, so when the Segway finally hit the stores it was as much a subject of ridicule as of awe. I think though that time will prove Kamen right. PEV’s will dominate the roads in due course, only this transportation revolution will not be planned out by either governments or companies; it will be driven instead by grass-roots interest, from people finally awakening to the absurdity, cost, and inefficiency of cars in an urban environment and hopping onto electric bikes and scooters.
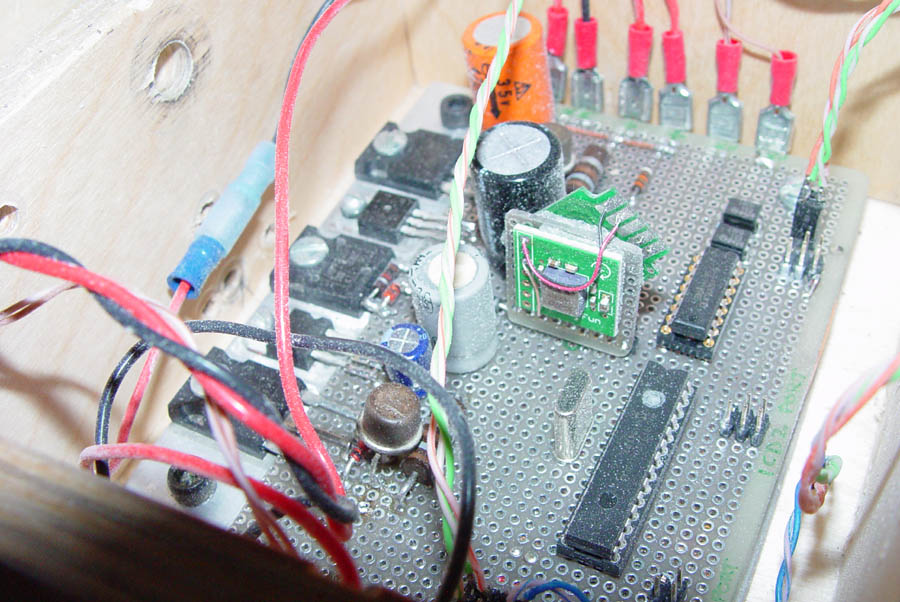
The actual control circuitry for the board is quite simple. A single PIC16F73 microcontroller reads all the sensor input and commands the H-bridge motor driver accordingly. The algorithm used to keep the board balanced is very straightforward, although implementing it in bug-free assembly code required many long evenings. Effectively, the microcontroller reads the sensors detect if the deck tilted too far forwards. If so, it increases the motor power to drive the board in from under the rider. The motion is smoothed out by calculating the rate at which the angle is changing, and backing off if it is changing too fast.”
Permalink
Permalink
And I’m thinking this is about as close to a hover board as we are ever going to see.
Permalink
Can i have one please…
Permalink
?
Permalink
You could build one. 🙂
Permalink
The commercial(official) version is cool
Permalink
Ha! Those look fun, but dangerous.