

Since this Electric Trike was a school project there were lots of cool tools that were are the disposal of Smegger. By the looks of it the electronics and motors are top notch.
Video after the jump.
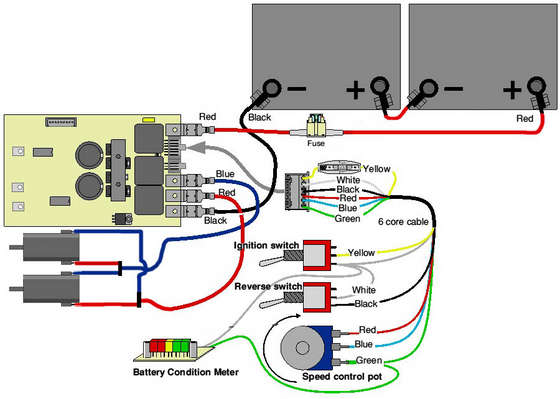
"- I used two 12v 32amp batteries – A 75amp 24V speed controller made by 4QD in England- quite pricey but really reliable – 5 LED battery condition meter – Plunger pot for throttle – Lots of cable – Connectors for batteries – Two 24v 300W DC motors"

Permalink
Nice. But looks like the handle bars are too far forward to be comfortable.
Permalink
Wow, that’s the fastest trike I’ve seen. Wish I had one like that when I was younger!
I miss having access to college electronics facilities.
Permalink
Permalink
Is there a gyro mechanism in there to assist with steering? since each motor is likely to produce slightly different output, causing the vehicle to veer to one side when driving…
Permalink
Hi Kanester,
Would it not be balanced since there are two motors?
Permalink
Not really, since the power output of two motors at the same supplied current will not be exactly the same. This is a common theme you see on the Robot Wars program, where you have a gyroscope which feeds back into the steering/speed controllers for each side of the bot. I’m not 100% certain, but I think you require a speed controller on either side and the gyroscope circuit measures lateral g-forces when you are supposed to be going straight and adjusts the speed on either side of the vehicle.
Here’s a quickly dug up link to a forum discussing it…do a google search for better info.
Permalink
d’oh that link:
http://www.fightingrobots.co.uk/discus/messages/13/1854.html?1203772021
Permalink
Interesting, I had never thought of that issue before. The full project build details link can be found in the article above. It doesn’t look like there is any gyro installed. With this design I wonder if it would be a problem since I have seen some go-carts with a single motor and drive wheel (however I have no idea how well they drove).
Permalink
Permalink
Didnt Lister have one of these on Red Dwarf? 😛
Permalink
Hello everyone. I am the maker/designer from Instructables where I posted it originally.
Firstly, until now I have not realised the amount of interest on the web, thanks very much to everyone! There was no gyro mechanism installed- too complex! The forks for the steering are at a steep rake so that the wheels ‘leans’ as you turn the bars. This improves the steering dramatically.
I did consider the use of a dual motor design and what effects it would have on the handling and came to the conclusion that the setup would act as a sort of ‘differential’ when steering. The controller and motors are able to take the increased resistance when cornering so you can’t notice anything.
The handlebars are too far forward yes. I didn’t really concentrate on the ergonomics of this design that much. I just wanted it to work in the end for the projects sake!
Anyway, I’ve stripped this vehicle down and am now reusing the electronics for another project more in the shape of a go kart. I am going to use these plans from this awesome site with many other projects too—> http://buggies.builtforfun.co.uk/Kart/index.html