 Â
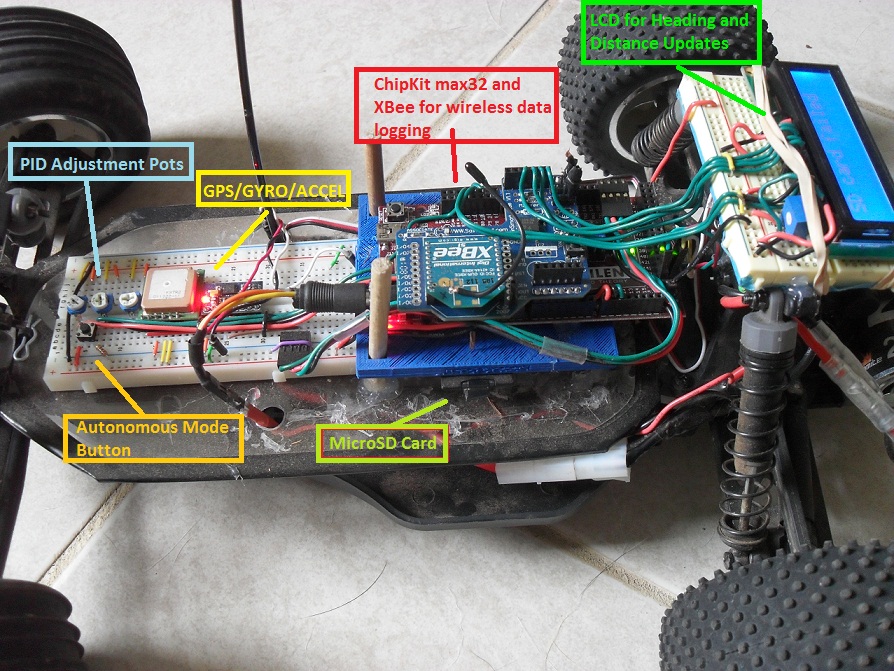
Jason Dorweiler has built an Autonomous Car that is based on a simply off the shelf $100 RC car. The car is loaded up with a bunch of sensors and visual technology. An Arduino is being used to tie everything together. The video below demonstrates a parking lot test that seems to have worked very well.
Thanks for the email Paul.
“For the localization of the car I’ll be using a GPS sensor and accelerometer. First, the GPS will find the starting coordinates of the car. Then the car will start moving, somewhat blindly at first. Once the car is moving, data from the accelerometer and elapsed time can be used to calculate the velocity of the car. These two measurements are then passed into a Kalman filter to improve the accuracy of the car’s position.
At the same time, heading data from the GPS and gyroscope are passed into another Kalman filter to get an accurate heading on the car. The position and heading data from the Kalman filters is then compared to a GPS waypoint given to the sensor and motor control. Next, a heading toward the desired GPS waypoint is calculated, and the appropriate signal is sent to the steering servo in order to point the car in that direction.”