
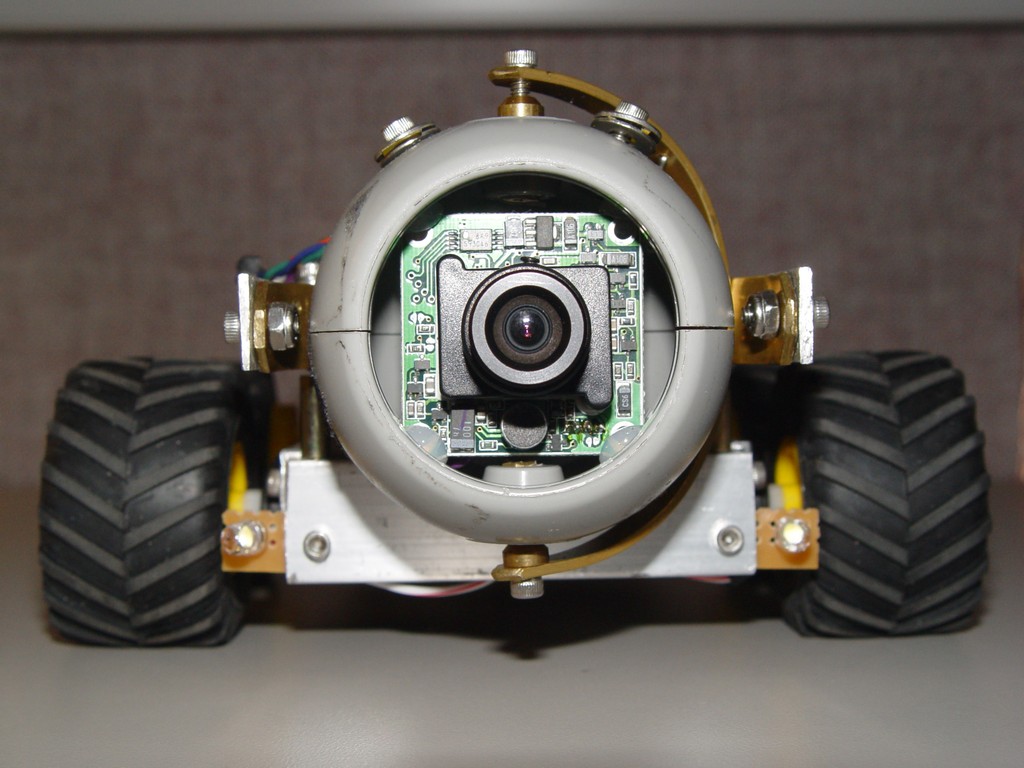
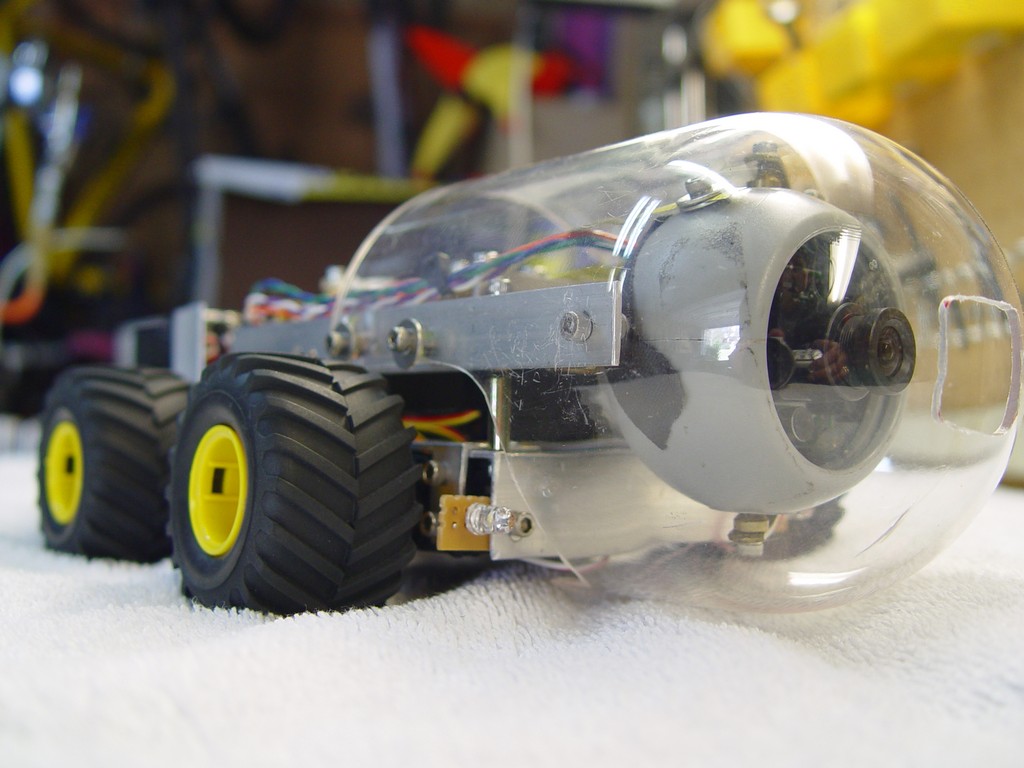
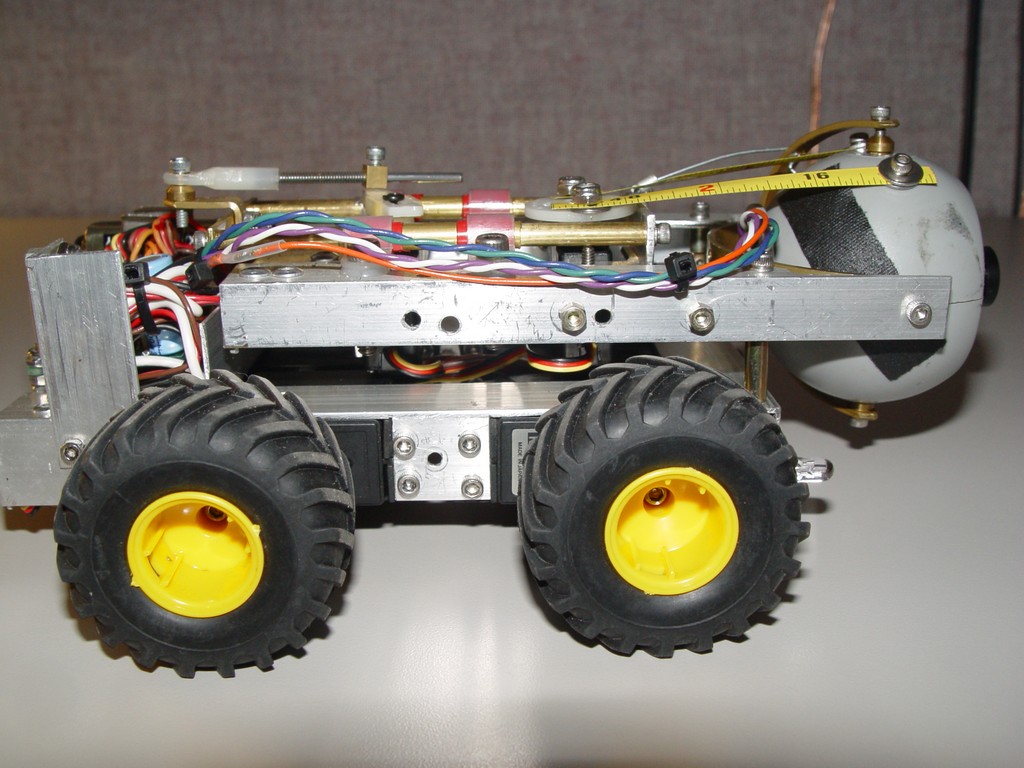
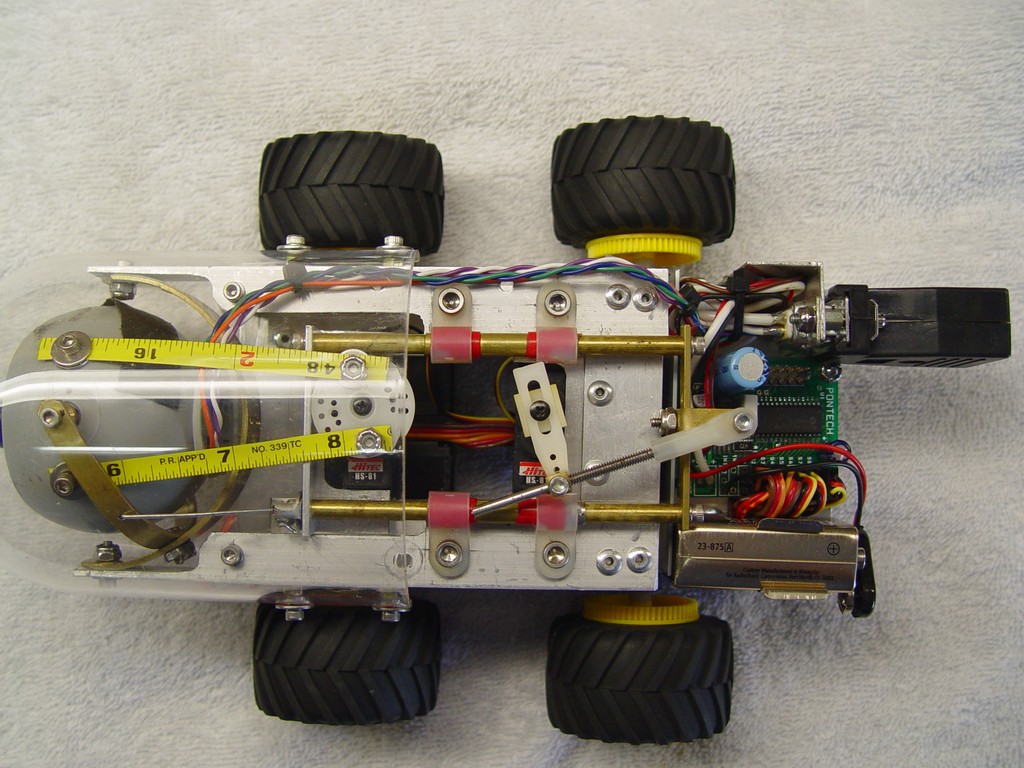
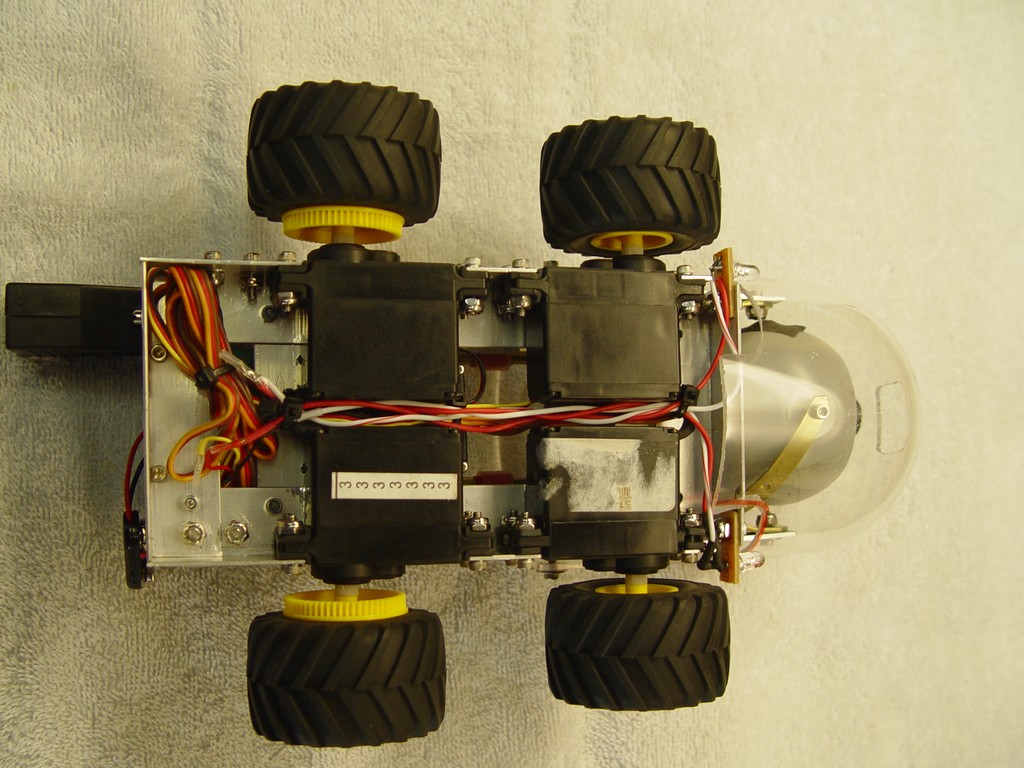
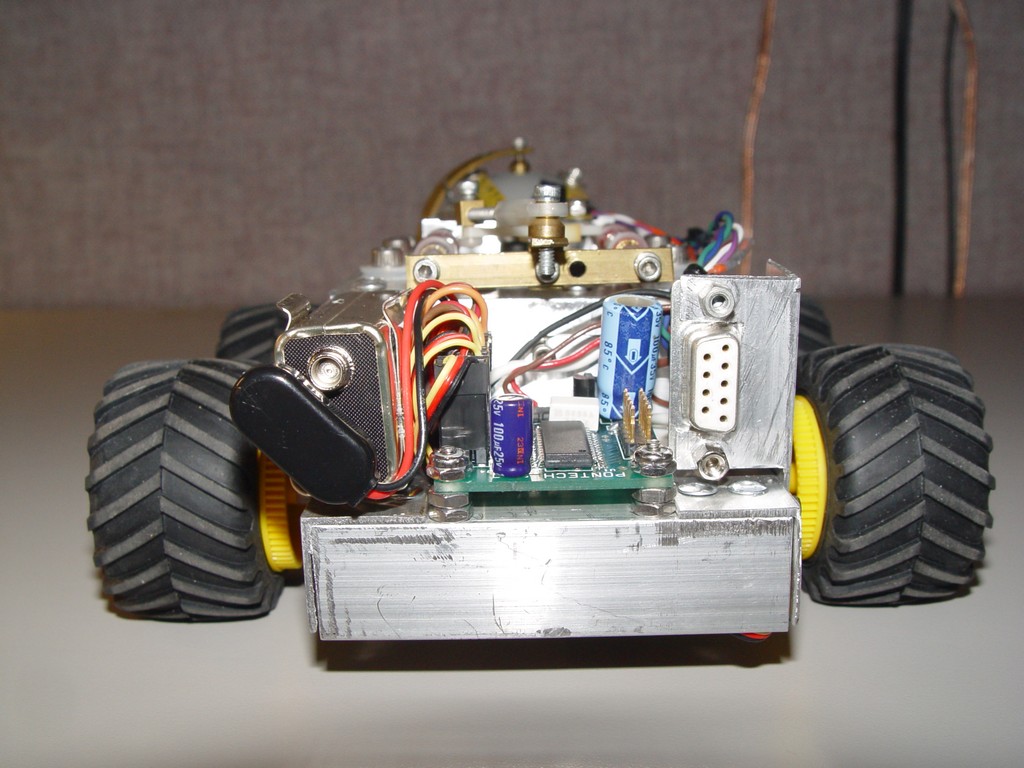
This Robotic Camera for Hole Investigation system by Cannibal Robotics was built to have a look in a mystery hole. The camera can pan and tilt, the unit takes serial movement commands so that it can be driven from outside the hole using a tether cable (that can also be used to yank out the robot if it gets stuck). The system uses 4 servo motors that have been modified to operate in a constant rotation mode.
Permalink
4 servo motors for drive ?
Permalink
Seems like treads would have made it much more useful for hole crawling.
Permalink
Dude that’s really cool! Of course you know pervs would be using these in women’s bathrooms! ha!
Permalink
and i thought this kinds of machine robots only exist in movies!
Permalink
I really like that, especially using servos as ‘direct-drive’ motors for the wheels. You could easily re-wire the servos so that one control board drives the motor of two, avoiding potential problems with two servos on the same side spinning at different speeds from an incoming split signal.
For a while now I’ve wanted to make a very small RC car with full proportional drive/steering control and a wireless camera so I can drive it with my LCD glasses, like I’ve done with my Tamiya TLT-1 but on a much smaller scale to explore small spaces.
I’d use a V-Tail Mixer to get tank-like control with a normal RC TX/RX setup so no need for a steering mechanism, with micro servers as the wheel drivers – £10 for 4 on eBay 🙂
Permalink
Permalink
pls send for me robot programs & pictures & maps
pleas help me