Â
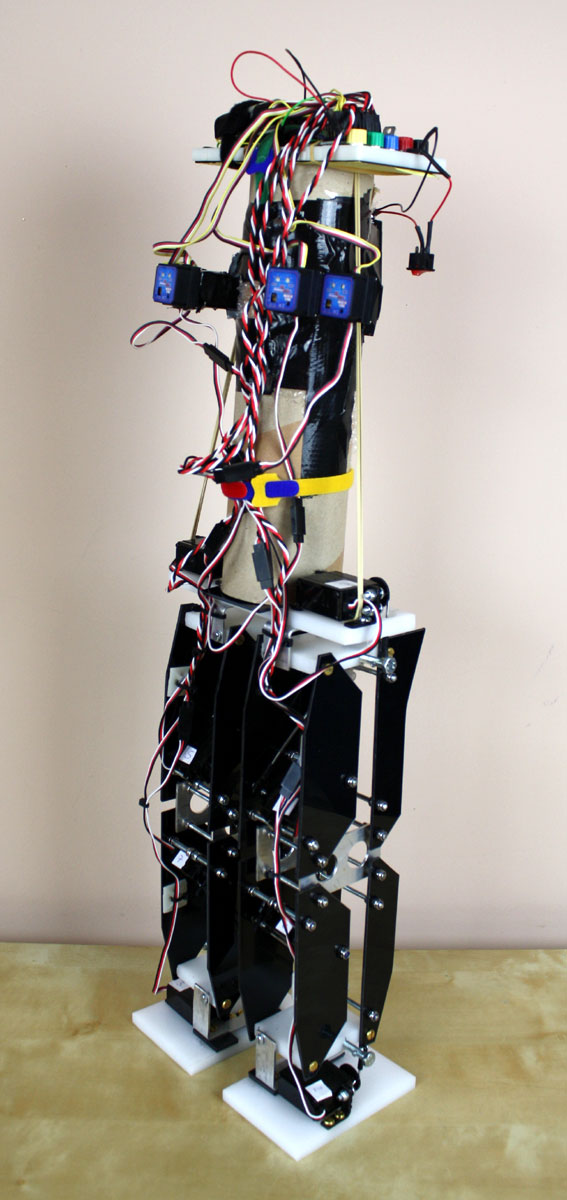
James Burton from XRobots.co.uk has sent in the latest progress on his Bipedal Dynamic Stability Testing. Looks to be moving along very well.
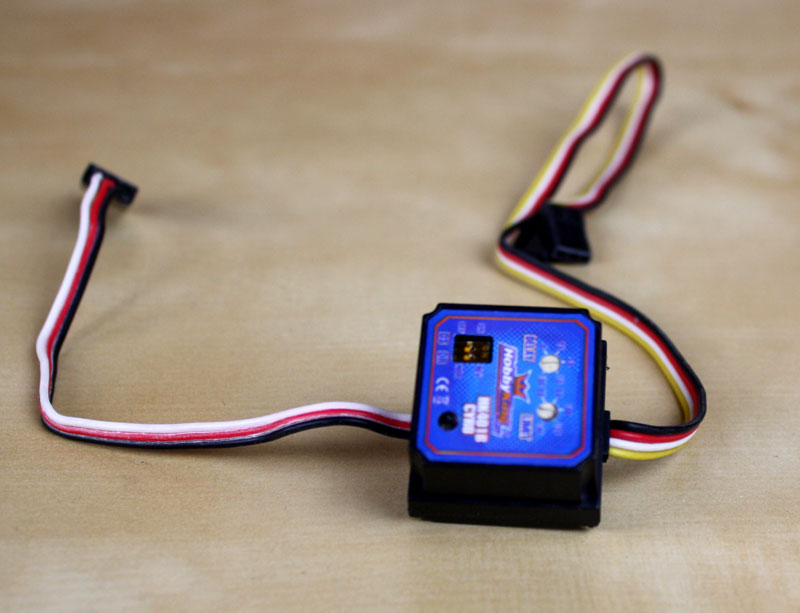
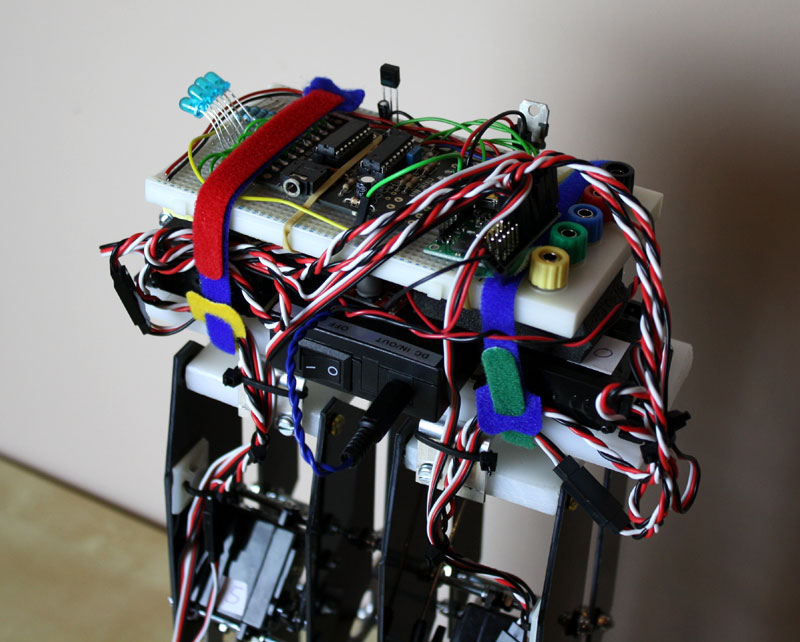
“It’s about half the height of an average person and I built all the parts from scratch with hand tools. It’s basically intended as a development platform so I have some more to build and some more experiments to do, but I’m at the stage where I have dynamically stable walking using R/C style heading gyros intended for use with R/C helicopters. The whole thing is currently controlled with a single Picaxe-18X micro controller.”