So if making a robot that can be remotely controlled wasn’t a tough enough challenge the guys over at Ufactory decided to make one that can roll around on a ball. Great looking design and it sounds like they are going to do a Kickstarter for it and release it as open source hardware to the community. I can’t wait to see a larger version that can be ridden around!
Via: Make
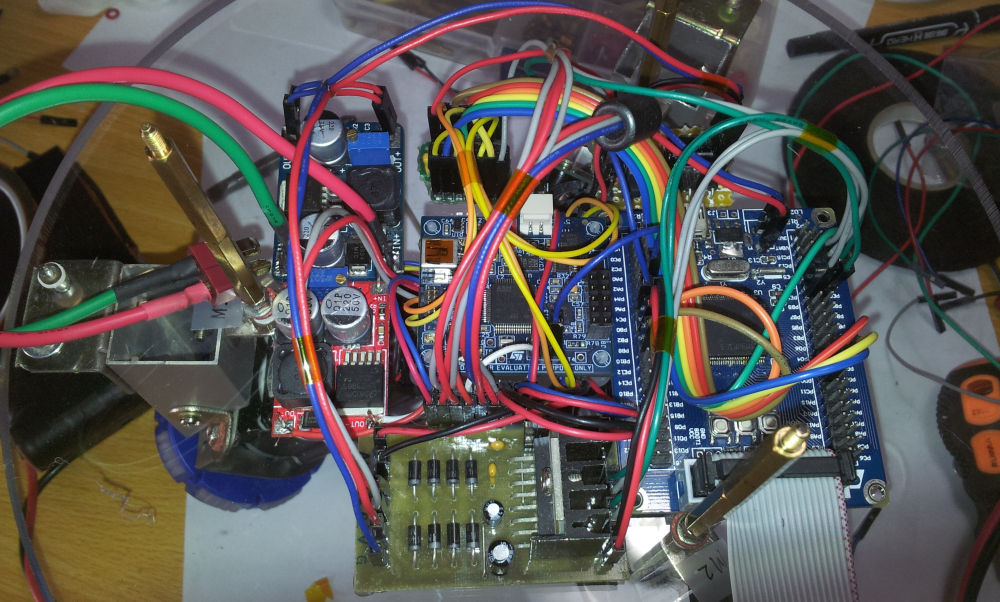
“The hardware may include: Gyro sensor, Accelerometer, Geomagnetic sensor, Wireless module, WIFI module, Camera, Kinect, STM32 MCU, Atmega16 MCU, Brushed DC motor (with gear box), encoder, DC motor driver, Controller power supply and motor power supply.”