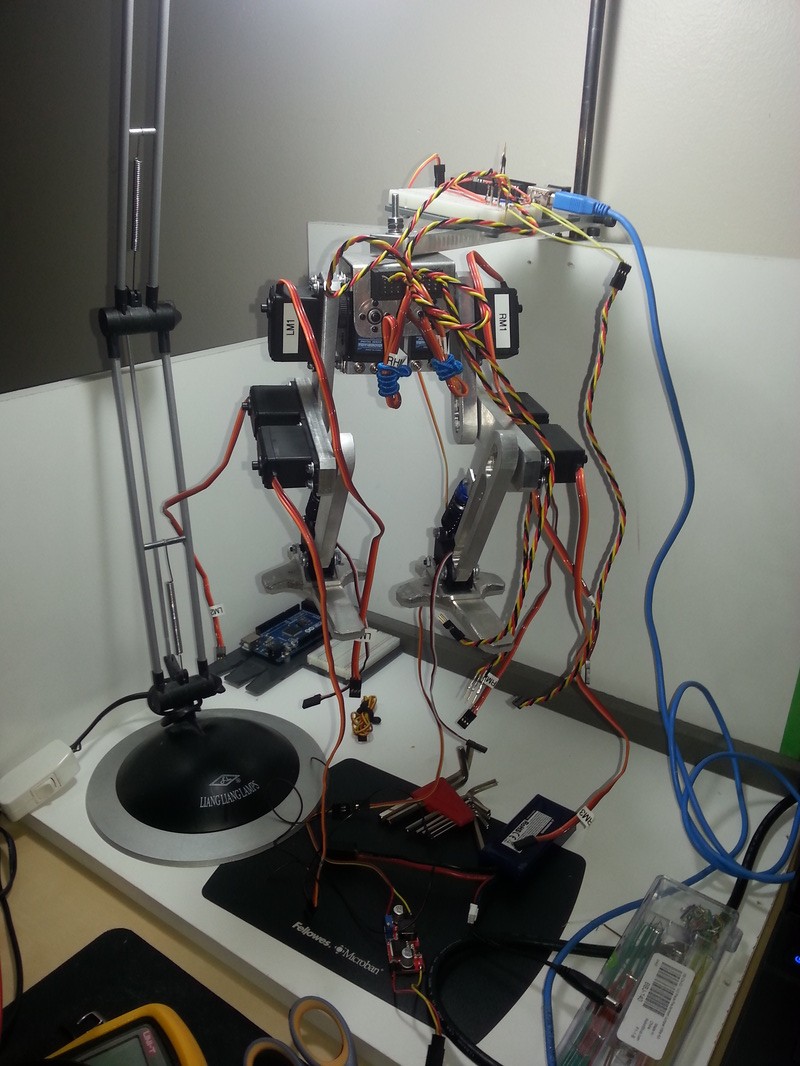
This is a work in progress by Ye Guan, his Bipedal Walking Sentinel Project is a work in progress but the goal is challenging and Ye is making good strides towards a functional walking robot so far. What he is going for is a robot that looks something like the sentinel walker from Warhammer 40k and the two legged walker from Star Wars.
“ The robot will have a complete compliment of sensors to help it understand its surrounding and its own condition. The current design uses a total of seven sensors. For external obstacle avoidance there is a sonar sensor to detect long range surroundings, and an inferred distance sensor pointed down to detect the surface conditions for the robot’s next step. The sonar will allow the robot to detect and walk around large obstacles while the inferred sensor allows the robot to accommodate for changing road conditions, such as stairs. Two pressure sensors will be built into each foot to detect when the foot is on the ground. A gyroscope/accelerometer will be mounted in the head of the robot to inform the robot changes in its orientation and balance so it can adjust itself before falling. A photo detectors will tell the robot to turn on its head lights when there is a lack of ambient lighting. Finally temperature sensors will be added to make sure the system do not overheat, especially with the batteries and microcontrollers in such close proximity due to the space constraints. The entire system will be controlled through a Arduino Mega 2560 microcontroller mounted in the robot’s head.”