
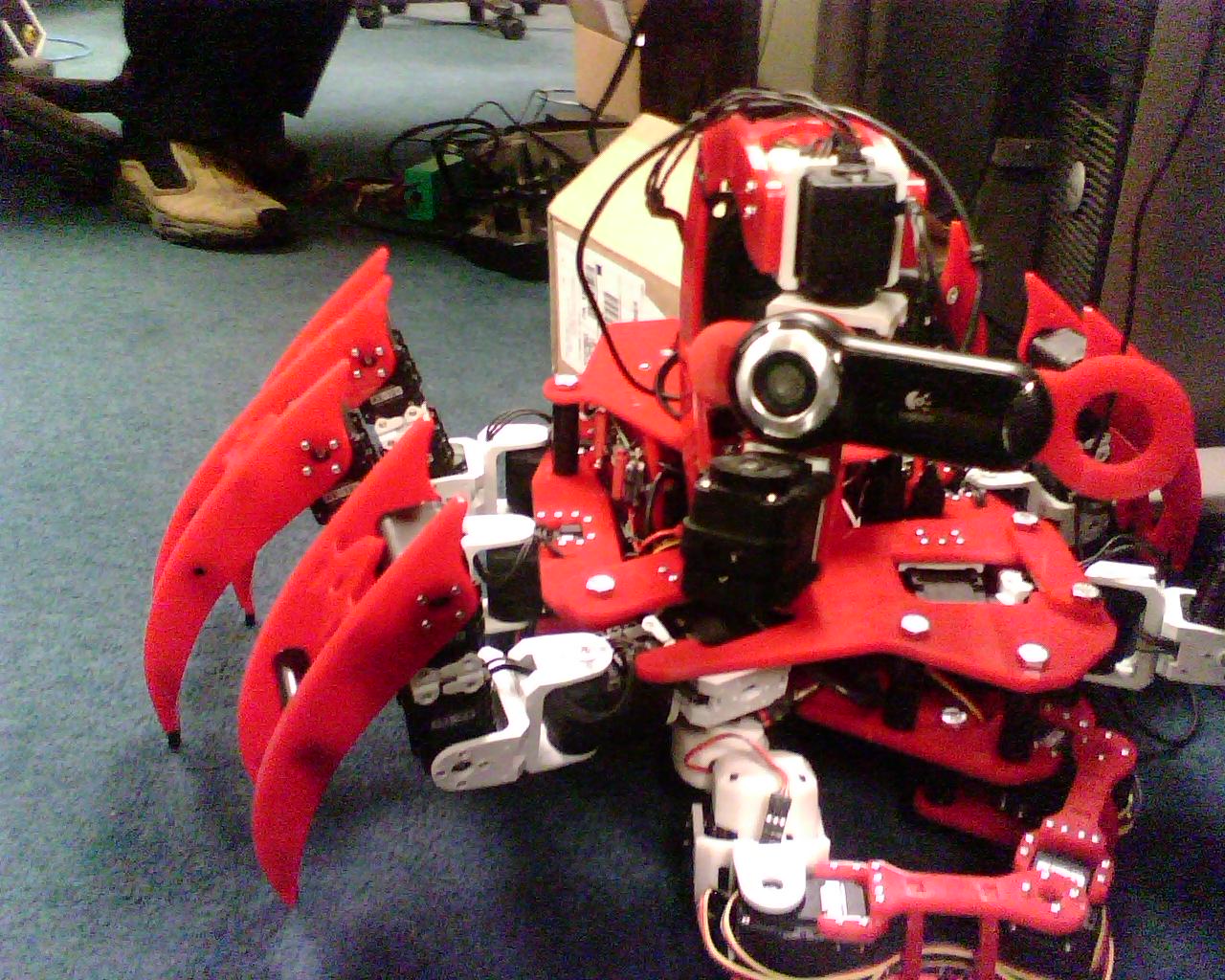
You may remember the Hexapod Robot that Matt Denton built. I think this new Chiara Robot could give Matt a run for his money as far as features and power. Chiara was developed at Carnegie Mellon University’s Tekkotsu lab, best of all it will be manufactured and sold by RoPro Design, Inc. David Touretzky, Gaku Sato, Ethan Tira-Thompson, and David Rice have done a great job on this system. I can’t wait till it gets released to see what its full potential is!
"Chiara Features:
- Fully assembled and ready to run right out of the box
- Six legs provide stable and precise holonomic motion
- 6 DOF arm with gripper lets the robot acquire and manipulate objects
- Digital servos: 24 Dynamixel AX-12+ servos with position and force feedback, plus three analog microservos in the gripper
- Pico-ITX computer: x86 architecture with 1 GHz processor, 1 GB RAM, and 80 GB hard drive provides serious on-board computing power
- Logitech webcam: QuickCam Pro 9000 on a pan/tilt mount for sophisticated robot vision programming
- Infrared rangefinder: Dynamixel AX-S1 sensor module with three-direction IR rangefinder mounted directly below the camera for multimodal sensing
- Networking: Ethernet plus 802.11(b/g) allows the robot to communicate with you and other Chiaras
- Ubuntu Linux OS: widely used, free, and open source
- Tekkotsu application development framework using C++ provides integrated vision/kinematics, teleoperation, and monitoring.
- Audio and LED outputs: essential tools for human-robot interaction
- USB bus lets you extend the robot by adding your own USB-compatible devices
- Open source body design allows you to customize the Chiara by changing component shapes, adding sensors, etc."


Permalink
Permalink
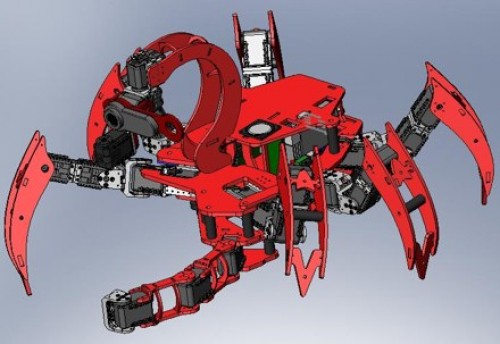
Hello!! My name is Ricardo, I’m from Portugal and my master Thesis consists on Hexapod Locomotion.I will use the Chiara to implement may solutions but I need a prototype of this robot. I need a solidworks model like the second image above, to program de robot on the Webots and then buy the chiara and implement on the real robot. I would like to know if someone can help me because I would like to know where find this model of chiara. Thank you all and I hope someone can help me in this problem.