
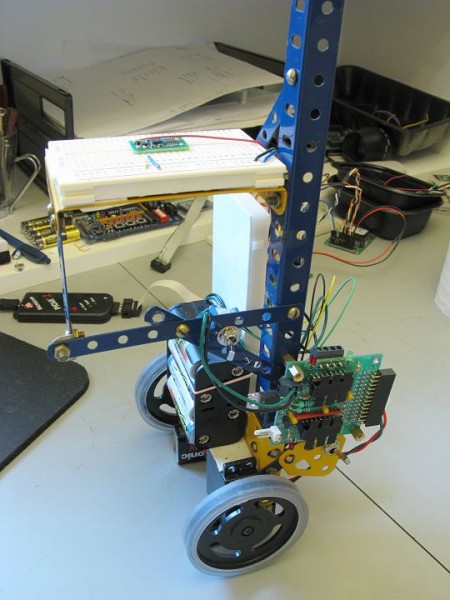
Futz’s Microcontrollers & Robotics has a few balancing robots featured, the second version was built on the non functioning first attempt. It is still a work in progress but the build log is good and it will be interesting to see the progress of this project all the way to completion. Still seems that accelerometers are quite pricey, has anyone found a good deal on these anywhere? See a video of the work in progress after the jump.
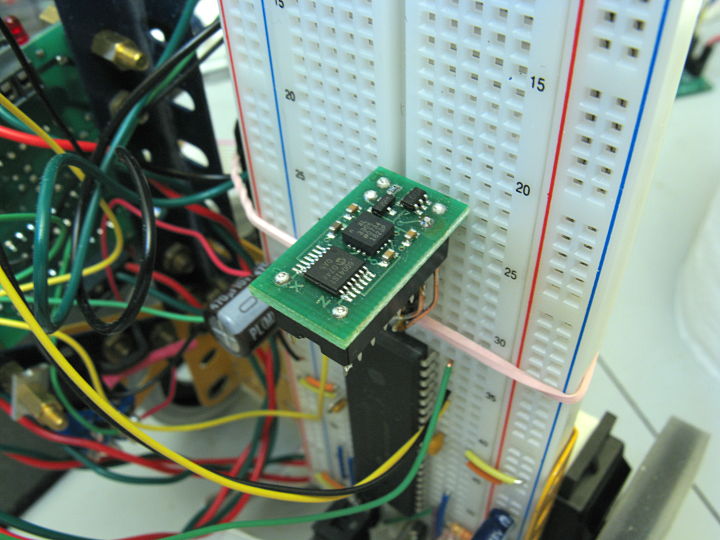
"Woohoo! I now have an Analog Devices ADXRS150 gyro on a Sparkfun breakout board (left). That, in combination with my Dimension Engineering DE-ACCM3D accelerometer, should get this thing balancing once I get the software squared away. After playing with it for a while I moved the gyro down to the centerline of the axles where I believe I’ll get the best response from it (right). The gyro is ultra sensitive and really "locks" the tilt attitude of the robot. You can feel it trying to keep the robot’s tilt right where it is. But it drifts, as all gyros do and pretty soon the bot is leaning way over."
Permalink
That balancing system work ? and why You use multi bord for that smal aplication?
Permalink
project
Permalink
For such applications it would be fun, and fairly cheap, to try to incorporate the Wii mote accelerometers.
Permalink
You want a cheap accellerometer? grab a WII nunchuck – has a 3 axis sensor in it. You can also use the nunchick as is without tearing it apart, as it communicates via an I2C protocol