
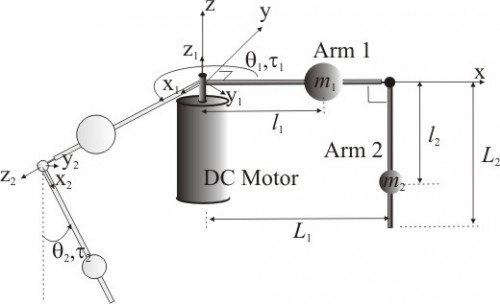
Watch the video above to get an appreciation of what the double pendulum is capable of when it is free wheeling. Have a look at the furuta pendulum project that Oyvindbjo made at Norwegian University of Science and Technology. I have added some of the calculations from Wikipedia for some amusement (I have no idea how to decipher it).
"For swing-up it uses feedback linearization and a controller that pumps energy into the system. The balancing controller is derived from LQG. Since the system uses full-state feedback and only the angles are measured, the angular velocitys are estimated by measuring the time between two angular positions. This in combination with flexibility in the aluminum rods, delay in the acquisition and control system and choice of controller results in oscillation. "
![]()
and
![]()
Permalink
The equations are actually pretty straightfoward! They´re what you get from F=m*a (linear motion) and it’s angular equivalent. The non-linearities are just sin’s and cos’s. There’s a detailed example here -> http://www.engin.umich.edu/group/ctm/examples/pend/invpen.html
On the other hand, the control system is just beautiful! LQG is really worth the effort…