Malte Ahlers from Germany sent in this great Microsoft Kinect controlled Delta Robot (translated to English). We have seen quite a few Kinect hacks recently but this one represents something that interfaces very well with an external device like we have seen in the past with quite a few Wiimote Hacks.
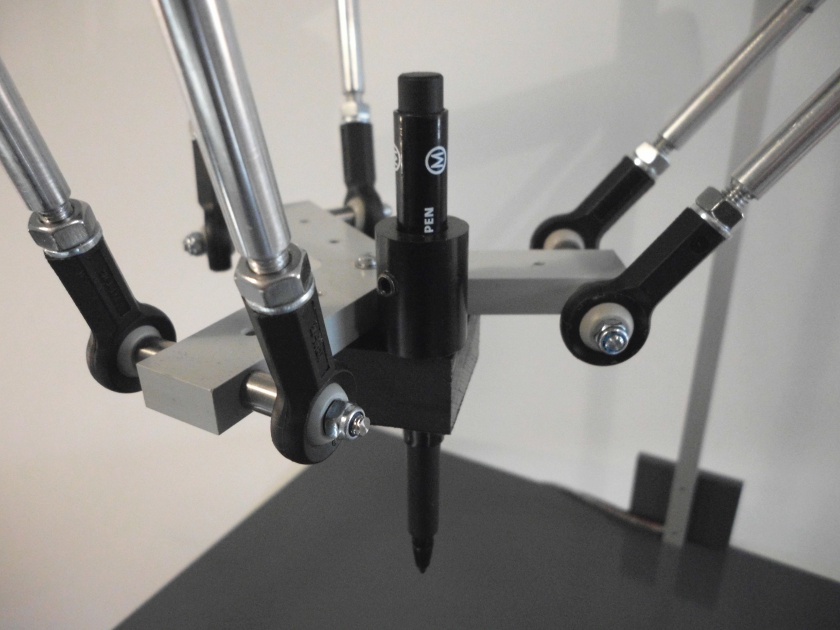
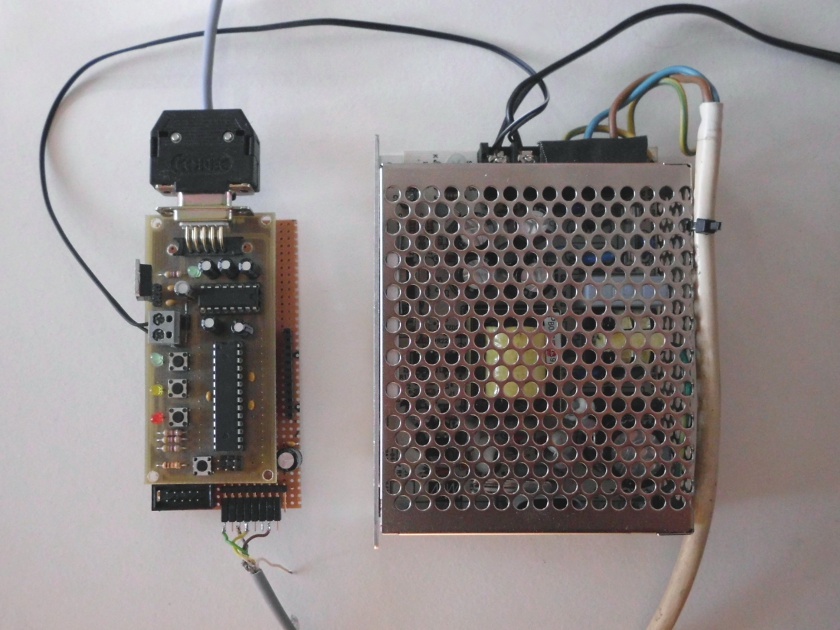
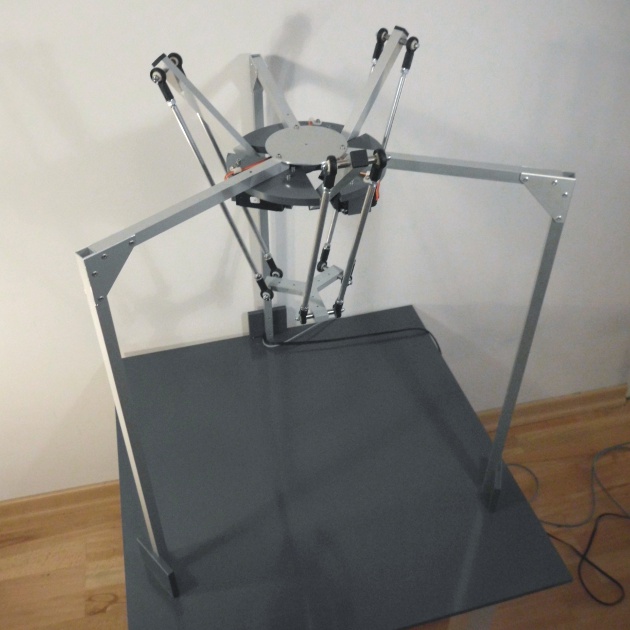
“I built a delta robot and tried to control it with the Microsoft Kinect sensor. My aim was to make the delta robot pick objects only by gestures and body movements. The robot is actuated by three servo motors which are controlled by an AVR microcontroller. The AVR receives the desired x-, y-, and z-coordinates for the platform via RS-232 from a PC and calculates the inverse kinematics for the robot, accordingly. The robot’s firmware was implemented in BASCOM (a BASIC dialect for AVR microcontrollers). A solenoid is attached to the platform of the robot to pick steel balls. I used the Kinect for Windows SDK to get the skeleton tracking data from the Kinect sensor. I implemented a simple C# application that tracks my left and right hand and sends this data to robot via RS-232. With my right hand I move the delta robot’s platform in x-, y-, and z-direction, by raising or lowering my left hand I turn the solenoid on and off, respectively.”