
If you like robotics and PIC microcontroller projects like I do this PIC Robot Centipede is sure to tickle your fancy. The project uses the cool Centipede Robot.
Video after the jump.
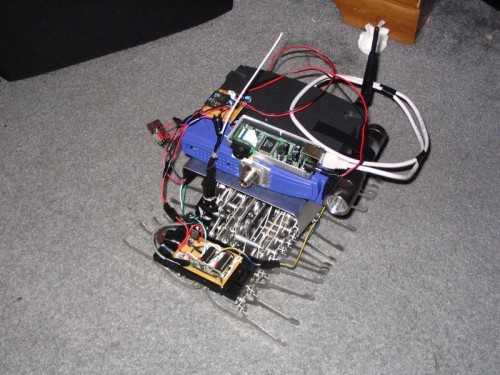
“I ordered a bunch of PIC programming materials at the start of summer break to learn more about embedded development and generally play around with them. For my first sizeable PIC project I decided to replace the brain on my Mechamo Gakken Centipede kit with a radio controlled PIC motor controller.
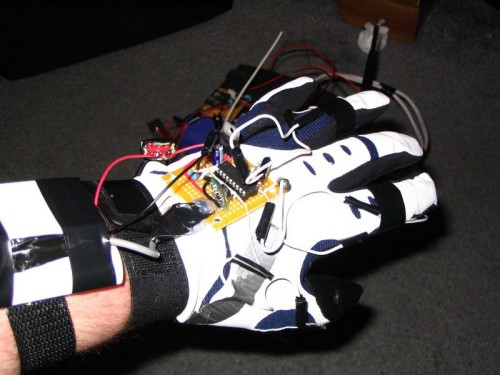
This mechanical kit is full of tiny fiddly pieces, but it still only took me about 4 hours to put together. It is very cool stock, but it is somewhat limited by the infrared controller (hence this project). I was inspired by this network rover put together by someone in Japan. I decided to make the motor control PIC based so I could more easily control it with a keyglove which is less practical than a network interface, but is intuitive, requires no computer, and looks science fiction-y. I also happened to have a 1-watt Luxeon LED flashlight, a WRT-54G with hacked client mode firmware, and a network camera laying around so they all got mounted onto the robot. ”
|
Here are a few other videos of the same type of robot (non-modified). |

Permalink
actually it is difficult to manufacture this type of equipment cz the radio wave which transmits the signal oscillates approximately 70 million times a second and the hard impulse (according to its width) of 1/1000e with 1/500e of second. ….(here i am consedering the principle of modern radio controller)…
An additional problem is that you want to send information for several things at the same time: The rudder (or direction), the speed of the engine or ailerons for planes. As in equipment RC, there are usually at least 2 ways, in a cycle, at least two impulses are transmitted: the impulse of channel 1, the impulse of channel 2, (that of channel 3), etc then the cycle is repeated. The information of the state of each channel is sent in screens: repetition of the sequence of impulses with generally 50 screens a second. Channel 1, channel 2,… then a small pause to separate the screen which has just finished following screen then another screen….
when u operated it with variable speed transmission then the problem is the majority of the modern integrated circuits are unable to provide strong currents (and even of small engines on cars or aircraft ask many amps when they start or turn to full power, more than one engine of opening of a door of garage!)…..
…however nice work……)