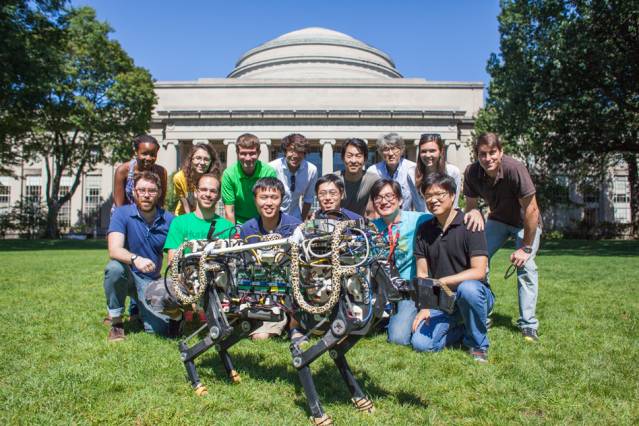
The MIT Biomimetic Robotics Laboratory has been working hard on the MIT Cheetah Robot. Deborah Ajilo, Negin Abdolrahim Poorheravi,John Patrick Mayo,Justin Cheung, Sangbae Kim, Shinsuk Park, Kathryn L. Evans, Matt Angle, Will Bosworth, Joao Luiz Almeida Souza Ramos, Sehyuk Yim, Albert Wang, Meng Yee Chuah, and Hae Won Park are members of the huge development team. Why so many team members? This is not a simply problem to tackle, as you read through their post you will see that there were a number of challenges that they needed to overcome in the development of the system.
Via:Â Evan Ackerman at IEEE Spectrum
“Now MIT researchers have developed an algorithm for bounding that they’ve successfully implemented in a robotic cheetah — a sleek, four-legged assemblage of gears, batteries, and electric motors that weighs about as much as its feline counterpart. The team recently took the robot for a test run on MIT’s Killian Court, where it bounded across the grass at a steady clip.
In experiments on an indoor track, the robot sprinted up to 10 mph, even continuing to run after clearing a hurdle. The MIT researchers estimate that the current version of the robot may eventually reach speeds of up to 30 mph.
The key to the bounding algorithm is in programming each of the robot’s legs to exert a certain amount of force in the split second during which it hits the ground, in order to maintain a given speed: In general, the faster the desired speed, the more force must be applied to propel the robot forward. Sangbae Kim, an associate professor of mechanical engineering at MIT, hypothesizes that this force-control approach to robotic running is similar, in principle, to the way world-class sprinters race.”